Ų¹▄ć(ch©ź)┐╔ęįöÓ└m(x©┤)Ųäė(d©░ng)Ż¼Ą½Ū░╠ß╩Ūę¬į┌Öz£y(c©©)¤o(w©▓)Ū·▌SĘĮ├µå¢(w©©n)Ņ}ęį║¾ĪŻŲ¹▄ć(ch©ź)╩╣ė├Š▀ėąļŖę║²X▌åōQō§Ą─F1─Ż╩ĮŻ¼═©▀^(gu©░)³c(di©Żn)╗ķ_(k©Īi)ĻP(gu©Īn)Ųäė(d©░ng)Ū·▌S├³┴ŅŻ¼═©▀^(gu©░)┐žųŲöÓ┬ĘŲ„║═īŻė├Ū·▌S└^ļŖŲ„Ż¼╩╣╦³│╔×ķé„▌ö┐žųŲå╬į¬ĪŻų╗ėą«ö(d©Īng)TCUęŌūR(sh©¬)ĄĮūį╝║Ą─░▓╚½▓┼Ģ■(hu©¼)Ųäė(d©░ng)Ż¼╚╗║¾░l(f©Ī)╦═Ū·▌Są┼╠¢(h©żo)Ż©žō(f©┤)╠°ūāŻ®ĮoŪ·▌Sé„ĖąŲ„Ż¼╦∙ęįėą║▄ČÓå¢(w©©n)Ņ}ę¬┐╝æ]ĪŻ
═©▀^(gu©░)ī”(du©¼)▄ć(ch©ź)▌v▀M(j©¼n)ąąČÓ┤╬£y(c©©)įćŻ¼ųĖ│÷ø](m©”i)ėą├„’@Ą─å¢(w©©n)Ņ}ĪŻ┴╝║├Ą─ļŖ│žļŖē║Ż¼┴╝║├Ą─Ųäė(d©░ng)Ēææ¬(y©®ng)Ż¼┐┤╦Ų┴╝║├Ą─Ū·▌S▐D(zhu©Żn)╦┘ĪŻį┌└õĄ─Łh(hu©ón)Š│Ž┬ī”(du©¼)░l(f©Ī)äė(d©░ng)ÖC(j©®)▀M(j©¼n)ąą£y(c©©)įćŻ¼╚╗║¾═Żų╣▀\(y©┤n)ąąę╗Ģ■(hu©¼)ā║┐┤╩Ūʱ▀\(y©┤n)ąą£žČ╚╩Ūę╗éĆ(g©©)å¢(w©©n)Ņ}Ż¼Ą½ŅÖ┐═Ą─═ČįV▓ó▓╗į┌┤╦ĪŻĄĮ┴╦▀@ļAČ╬Ż¼Ų¹▄ć(ch©ź)Ą─ļŖ│žķ_(k©Īi)╩╝╩▄ĄĮė░ĒæŻ¼╦∙ęį┐┤╔Ž╚źĘ┬Ęø](m©”i)ėą╩▓├┤å¢(w©©n)Ņ}Č°░čŲ¹▄ć(ch©ź)Į╗Įo▄ć(ch©ź)ų„ĪŻ
╬©ę╗╩ŻŽ┬ę¬Öz▓ķĄ─╩ŪŻ¼═©▀^(gu©░)╩Š▓©Ų„▓ČūĮŲäė(d©░ng)ļŖÖC(j©®)▓┘ū„Ą─▓©ą╬ĪŻę╗éĆ(g©©)║├Ą─╚½├µÖz▓ķĄ─╩Ū┐┤ļŖÖC(j©®)ļŖ┴„ī”(du©¼)ļŖ┤┼ĶFäŅ(l©¼)┤┼Ą─ū„ė├Ż¼ę“?y©żn)ķ╦³╩Ūėąė├Ą─Ż¼┐┤▀@ą®ę“╦žķgĄ─ŽÓ╗źū„ė├ĪŻ×ķ┴╦½@Ą├ūŅ£╩(zh©│n)┤_Ą─ļŖ┤┼ķyļŖį┤ļŖē║Ą─ėøõøŻ¼╩š╝»▀@ą®ĮėĮ³Ųäė(d©░ng)čbų├▒Š╔ĒĄ─öĄ(sh©┤)ō■(j©┤)īó╩Ūę╗éĆ(g©©)║▄║├Ą─ų„ęŌŻ¼Ą½╩Ūįōå╬į¬╩Ū░▓čbį┌äė(d©░ng)┴”é„äė(d©░ng)ŽĄĮy(t©»ng)Ąū▓┐ĪŻ▀M(j©¼n)╚ļąĶꬥ╚┤²ę╗éĆ(g©©)éõė├═©Ą└Ż¼╚╗║¾ęŲĄ¶š¹éĆ(g©©)░l(f©Ī)äė(d©░ng)ÖC(j©®)┼ōŻ¼▀@╩Ūį┌└╦┘M(f©©i)Ģr(sh©¬)ķgĪŻį┌▀@éĆ(g©©)ė╬æ“ųąėąę╗éĆ(g©©)║Ńē║į\öÓąĶę¬ūĘŪ¾Ģr(sh©¬)ķgą¦┬╩ĪŻą┼╠¢(h©żo)ėøõøāx═∙═∙└’├µėą┤¾┴┐Ą─öĄ(sh©┤)ō■(j©┤)Ż¼╚ń╣¹Ęų╬÷š²┤_Ż¼┐╔ęįŽ¹│²ę╗éĆ(g©©)ĮM╝■╣╩šŽ╗“ūC├„▀@ę╗³c(di©Żn)ĪŻ
ī”(du©¼)ė┌▀@éĆ(g©©)▄ć(ch©ź)ą═Ż¼ę╗éĆ(g©©)ĘeśOĄ─Ęų▓╝╩ĮļŖ│žĮM░▓čbį┌ū¾é╚(c©©)ū∙╬╗║¾Ż¼═©▀^(gu©░)╣®ļŖļŖ└|║═Ųäė(d©░ng)Ų„ŽÓ▀BŻ¼į┌▀@└’▀ĆįO(sh©©)ėąŲäė(d©░ng)äŅ(l©¼)┤┼ļŖ└|ĪŻųžę¬Ą─╩Ū▀Ćū„×ķŲäė(d©░ng)ļŖÖC(j©®)įć“×(y©żn)Ą─╬╗ų├ĪŻ
▀@╩ŪĮY(ji©”)╣¹ĪŻ═©Ą└AŻ©╦{(l©ón)╔½Ż®š²į┌▒O(ji©Īn)£y(c©©)ļŖ┤┼ķyļŖį┤ļŖē║║══©Ą└BŻ©╝t╔½Ż®š²į┌▒O(ji©Īn)£y(c©©)ļŖÖC(j©®)ļŖ┴„ĪŻ▀@éĆ(g©©)ėąą®Õe(cu©░)š`ĪŻ
ūī╬ęéā┐┤┐┤═¼ę╗▓ČūĮĄ─Ė³ČÓ╝Ü(x©¼)╣Ø(ji©”)ĪŻ
į┌▓Č½@Ą─š¹¾wĮY(ji©”)śŗ(g©░u)ųą░³║¼š²│Żą┼╠¢(h©żo)Ą─╚▒╩¦į┌š¹éĆ(g©©)Ū·▌S╩┬╝■ųąĪŻ▓╗▀^(gu©░)Ż¼Ė·█Ö╚į’@╩Š│÷š²│ŻŲäė(d©░ng)ļŖÖC(j©®)▀\(y©┤n)ąąĄ─ūR(sh©¬)äe╣”─▄ĪŻ
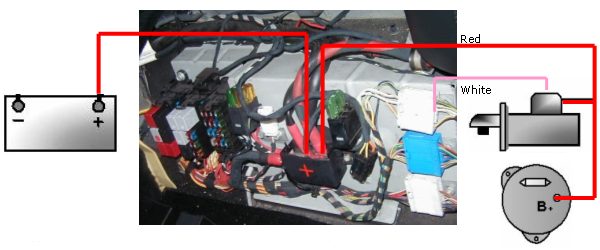
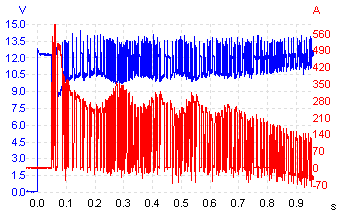
▓Č½@ķ_(k©Īi)╩╝ė┌ļŖ┤┼Ųäė(d©░ng)Ų„Įė╩š12Ę³ļŖ┤┼ą┼╠¢(h©żo)ĪŻ▀@ĻP(gu©Īn)ķ]┴╦ā╚(n©©i)▓┐Ą─┬ō(li©ón)ŽĄŻ¼═¼Ģr(sh©¬)╩╣ąĪ²X▌åŽ▌╚ļ’w▌åŠW(w©Żng)Įj(lu©░)║═╠ß╣®ļŖ│žļŖē║ĮoļŖÖC(j©®)ĄĮķ_(k©Īi)╩╝▐D(zhu©Żn)äė(d©░ng)ĪŻšł(q©½ng)ūóęŌ╝s50msĄ─čė▀tį┌äŅ(l©¼)┤┼Ę┤ü║═ļŖÖC(j©®)ļŖ┴„ų«ķgŻ║▀@╩ŪļŖ┤┼Ēææ¬(y©®ng)Ģr(sh©¬)ķgĪŻ╚╬║╬ķL(zh©Żng)Ą─čė▀tį┌▀@└’īó▒Ē├„Ż¼ļŖ┤┼ŠĆ╚”š²į┌Įė╩šļŖē║Ż¼Ą½ļŖÖC(j©®)Ę┤æ¬(y©®ng)╦┘Č╚▓╗ē“┐ņŻ¼┐╔─▄Ą─įŁę“░³└©ā╚(n©©i)▓┐Ą─ļŖ┤┼Įėė|▓╗┴╝╗“┐╔─▄░l(f©Ī)äė(d©░ng)ÖC(j©®)Ąž├µĄ└┬ĘĄ─å¢(w©©n)Ņ}ĪŻ▀M(j©¼n)ę╗▓Į▓╔╝»┐╔ę╔öĄ(sh©┤)ō■(j©┤)Ż¼ī”(du©¼)┬▌ŠĆ╣▄ļŖ┴„Ž¹║─▀M(j©¼n)ąąĘų╬÷Ż¼ęį┴╦ĮŌ╩ŪʱėąūŃē“Ą─┤┼ł÷(ch©Żng)š²į┌╔·│╔ĪŻ«ö(d©Īng)╚╗Ż¼▀@ų╗╩Ūę╗éĆ(g©©)└²ūėŻ¼ę“?y©żn)ķ▀@└’čė▀tĢr(sh©¬)ķg╩Ūš²│ŻĄ─ĪŻ
Ū·▌S─Ż╩Į║▄╚▌ęū┐┤ĄĮļŖÖC(j©®)ųąĄ─ļŖ┴„▓©ą╬ĪŻ╬ęéāš²į┌īżšęĄ─ę╗éĆ(g©©)┴╝║├Ą─▓ČūĮ╩ŪŽÓī”(du©¼)ŲĮ╗¼Ą─║═╔§ų┴ėą╝ŌĘÕĄ─į┌▄ē█EųąŻ¼├┐éĆ(g©©)ÜŌĖūėąę╗éĆ(g©©)ĘÕųĄŻ¼«ö(d©Īng)╦³ĮėĮ³TDCĢr(sh©¬)į┌ē║┐s╔ŽĪŻėąę╗éĆ(g©©)ŠÅ║═Ą─ļŖ┴„«ö(d©Īng)±R▀_(d©ó)═Ų▀M(j©¼n)╗Ņ╚¹Ģr(sh©¬)Ż¼╚╗║¾ę╗éĆ(g©©)Ė³┤¾Ą─ļŖ┴„░ķļS╗Ņ╚¹Ą─ē║┐sąą│╠║═ļŖÖC(j©®)ę¬╝ė▒Č┼¼┴”ē║┐sŪ╗ā╚(n©©i)Ą─╚╝┴Ž/┐šÜŌ╗ņ║Ž╬’ĪŻ
▀@éĆ(g©©)║å(ji©Żn)å╬ĮŌßīĄ─▒│║¾╩Ūę╗éĆ(g©©)Ė³╝ėįö╝Ü(x©¼)Ą─└ĒšōŻ¼ļŖÖC(j©®)ļŖ┴„╚ń║╬╚ĪøQė┌ŲõÖC(j©®)ąĄžō(f©┤)║╔ĪŻ║å(ji©Żn)čįų«Ż¼ļŖÖC(j©®)äō(chu©żng)Į©ļŖäė(d©░ng)ä▌(sh©¼)Ż©EMFŻ®Ż¼į÷╝ė╦┘Č╚Ż¼Ę┤ĘĮŽ“Įo╦³╣®æ¬(y©®ng)ļŖē║ĪŻ▀@éĆ(g©©)Ę┤Ž“ļŖäė(d©░ng)ä▌(sh©¼)£pąĪ┴╦┴„ĄĮļŖÖC(j©®)Ą─ļŖ┴„ĪŻįĮ╩Ū╚╬äš(w©┤)ųžĄ─ļŖÖC(j©®)žō(f©┤)▌dŻ¼╦³▀\(y©┤n)ąąĄ─╦┘Č╚▌^┬²Ż¼╦∙ęįėąąĪĄ─Ę┤Ž“ļŖäė(d©░ng)ä▌(sh©¼)║═Ė³Ė▀Ą─ļŖ┴„ĪŻ├┐éĆ(g©©)ÜŌĖūĄ─ē║┐sų▒ĮėŲź┼õ├┐éĆ(g©©)ļŖ┴„ĘÕųĄŻ¼ę╗éĆ(g©©)├„’@Ą═Ż¼Ė▀╗“▓╗Š∙ä“Ą─Ė▀ĘÕæ¬(y©®ng)╠ßĖ▀ĻP(gu©Īn)ė┌ÜŌĖūĄ─ē║┐są¦┬╩å¢(w©©n)Ņ}ĪŻ╦³ę▓┐╔ęįūR(sh©¬)äeĪóĖ·█ÖĪó’@╩ŠŪ·▌Sųą╚╬║╬ėąå¢(w©©n)Ņ}ÜŌĖūŠĆ╚”Ą─ą┼╠¢(h©żo)Ż¼¼F(xi©żn)į┌ų╗╩ŪĖ∙ō■(j©┤)ļŖ┴„ĘÕųĄĄ─öĄ(sh©┤)ō■(j©┤)ėŗ(j©¼)╦ŃŪ·▌SĪó░l(f©Ī)äė(d©░ng)ÖC(j©®)Ą─³c(di©Żn)╗Ēśą“Ż¼ų▒ĄĮšęĄĮ┐╔ę╔ÜŌĖūĪŻė╔ė┌ėą┴╝║├Ą─▓╔śėĘČć·Ė·█Ö║═┴╝║├ļŖ┴„╠ĮŅ^Ż¼─ŃĢ■(hu©¼)¾@ŲµĄž░l(f©Ī)¼F(xi©żn)▀@ĘN╝╝ąg(sh©┤)┐╔ęį£╩(zh©│n)┤_Ąž▓ņėX(ju©”)Øōį┌Ą─å¢(w©©n)Ņ}Ż¼Ą½╬ęĮ^▓╗Ģ■(hu©¼)šJ(r©©n)×ķ▀@─▄╚Ī┤·ÖC(j©®)ąĄē║┐s║═ÜŌĖūą╣┬®Öz▓ķĪŻ
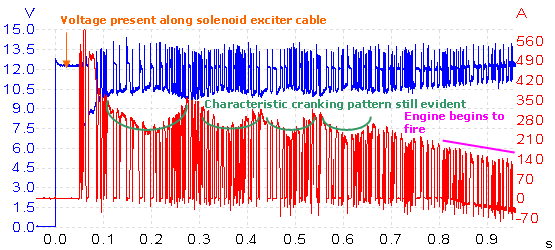
ūŅ║¾Ż¼╬ęéā┐┤ĄĮ┴╦ļŖ┴„ą┼╠¢(h©żo)Ž┬ĮĄĄĮžō(f©┤)ųĄĄ─┐é¾w┌ģä▌(sh©¼)ĪŻ▀@╩Ūę“?y©żn)ķŻ¼«?d©Īng)░l(f©Ī)äė(d©░ng)ÖC(j©®)³c(di©Żn)╗Ģr(sh©¬)Ż¼ļŖ┴„╩ŪÅ─░l(f©Ī)ļŖÖC(j©®)┴„Ž“ļŖ│žŻ¼ļŖÖC(j©®)ļŖ┴„│╔Ę┤ĘĮŽ“ĪŻ«ö(d©Īng)ļŖÖC(j©®)ļŖ┴„öÓ└m(x©┤)ĄžŽ┬ĮĄĄĮ┴ŃŻ¼▀@ā╔éĆ(g©©)ļŖ┴„Ą─┐é║═ūā?y©Łu)ķž?f©┤)öĄ(sh©┤)ĪŻō■(j©┤)╗∙▒ŠįŁ└Ē┐╔ęį┐┤│÷Ż¼į┌£y(c©©)įć³c(di©Żn)öĄ(sh©┤)ō■(j©┤)ęč▒╗ėøõø▀Ć░³└©░l(f©Ī)ļŖÖC(j©®)Ą─▌ö│÷ĪŻ
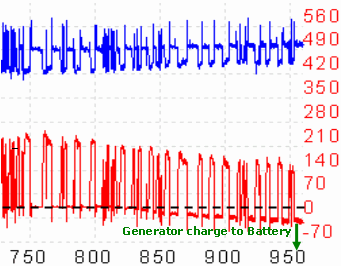
▀@└’╩Ū▓ČūĮĄĮ▓©ą╬Ą─Ė³įö╝Ü(x©¼)’@╩ŠĄ─ūŅ║¾ę╗▓┐ĘųĪŻį┌£y(c©©)įćŪ░Ż¼ļŖ┴„╠ĮŅ^╬óš{(di©żo)ĄĮ0AŻ¼Å─Č°╩╣╚╬║╬ļŖ┴„Ą─£y(c©©)┴┐Č╝ęį0×ķųąą─ĪŻ
Ģ║▓╗┐╝æ]äŅ(l©¼)┤┼ŠĆ╚”Ą─ļŖē║▄ē█EĪŻļSų°±R▀_(d©ó)▐D(zhu©Żn)äė(d©░ng)Ż¼ļŖ┴„ūį╚╗üĒ(l©ói)ūįļŖ│žŻ¼į┌▀@└’ļŖ┴„’@╩Š×ķš²śOąįĪŻ═╗╚╗Ż¼░l(f©Ī)äė(d©░ng)ÖC(j©®)ķ_(k©Īi)╩╝³c(di©Żn)╗║═░l(f©Ī)ļŖÖC(j©®)ķ_(k©Īi)╩╝░l(f©Ī)ļŖęįŽÓĘ┤ĘĮŽ“čžų°═¼ę╗ļŖ└|ĪŻ╠ĮŅ^╩░╚Ī║═╬ęéā┐┤ĄĮį┌0┐╠Č╚ŠĆ┴Ēę╗é╚(c©©)│÷¼F(xi©żn)┴╦ļŖ┴„ųĄŻ¼▀@╩Ū░l(f©Ī)äė(d©░ng)ÖC(j©®)╗žü─▄┴┐ĮoļŖ│žĪŻ
╚ń╣¹ī”(du©¼)▓Č½@ĄĮĄ─▓©ą╬ūą╝Ü(x©¼)Ęų╬÷Ą─įÆŻ¼ļŖ│žļŖ┴„Ą─ĘÕĘÕųĄ╩┬īŹ(sh©¬)╔Ž┬įėąŽ┬ĮĄŻ¼ļSų°ļŖäė(d©░ng)ÖC(j©®)½@Ą├ę╗▓┐ĘųÅ─░l(f©Ī)ļŖÖC(j©®)┴„═∙ļŖ│žĄ─ļŖ┴„ĪŻ«ö(d©Īng)╚╗Ż¼ė╔ė┌ļŖ│žŻ¼Ųäė(d©░ng)ļŖÖC(j©®)║═░l(f©Ī)ļŖÖC(j©®)ų«ķgĄ─ŽÓ╗źĻP(gu©Īn)ŽĄį┌Ū·▌S▀\(y©┤n)äė(d©░ng)Ų┌ķg░l(f©Ī)╔·Ą─║▄┐ņŻ¼╦∙ęįø](m©”i)ėą░l(f©Ī)ļŖÖC(j©®)▀^(gu©░)▌dĄ─╬ŻļU(xi©Żn)ĪŻ▀@╩ŪįŁę“ų«ę╗Ż¼×ķ╩▓├┤░l(f©Ī)ļŖÖC(j©®)«a(ch©Żn)╔·ų╗▒╚š²│ŻĄ─Ū·▒·▐D(zhu©Żn)╦┘┬įĖ▀Ą─ļŖ┴„ĪŻ
š{(di©żo)▓ķĄ──┐Ą─▐D(zhu©Żn)Ž“ą┼╠¢(h©żo)Ą─╚▒╩¦ĪŻę¬š²┤_šJ(r©©n)ūR(sh©¬)▓Č½@Ą─ą┼╠¢(h©żo)Ż¼╬ęéāąĶę¬╠ßąčūį╝║Ż¼╬ęéāš²į┌蹊┐ėąĻP(gu©Īn)Ą─Ųäė(d©░ng)ļŖÖC(j©®)▒Š╔ĒĪŻ
Ž┬ę╗Ēō(y©©) >>>
|